
Link6: ROS2 Stack, VLAs & Data Collection.
From a low-level Cortex API to a full ROS2 bringup with real/sim parity, teleop, calibration, and fault handling—this is the Link6 infrastructure I built to make learning on a real cobot actually possible.
From a low-level Cortex API to a full ROS2 bringup with real/sim parity, teleop, calibration, and fault handling—this is the Link6 infrastructure I built to make learning on a real cobot actually possible.
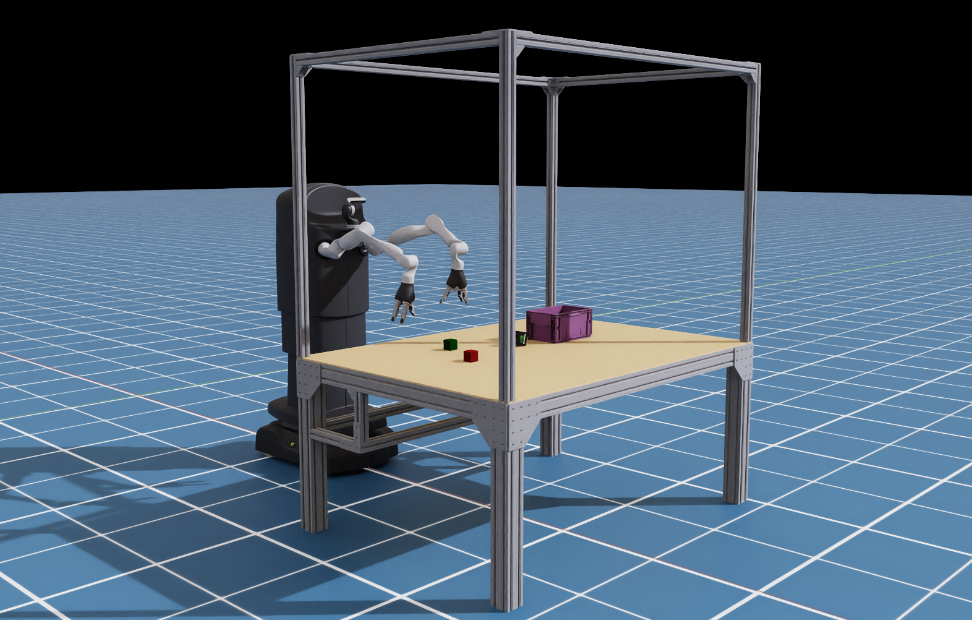
How I built a common Isaac Sim setup for MOVO and my Jaco table, cleaned up URDFs, aligned ROS2 interfaces, and created a shared playground where the same policies can run in sim and on the real hardware.