
Link6: ROS2 Stack, VLAs & Data Collection.
From a low-level Cortex API to a full ROS2 bringup with real/sim parity, teleop, calibration, and fault handling—this is the Link6 infrastructure I built to make learning on a real cobot actually possible.
From a low-level Cortex API to a full ROS2 bringup with real/sim parity, teleop, calibration, and fault handling—this is the Link6 infrastructure I built to make learning on a real cobot actually possible.

DexAloha is my build of the open-source HOPE JR hand: I assembled it, designed a custom motorized wrist that plugs into a Kinova Jaco, and (with Martino Russi) adopted an improved finger design that is easier to assemble and route cables through.

The long story of tracking a one‑minute‑then‑die power fault, opening smart batteries, rebuilding the base from first principles, adding modern sensing/compute, and restoring dual‑arm manipulation and giving a demo to the CEO of Kinova.
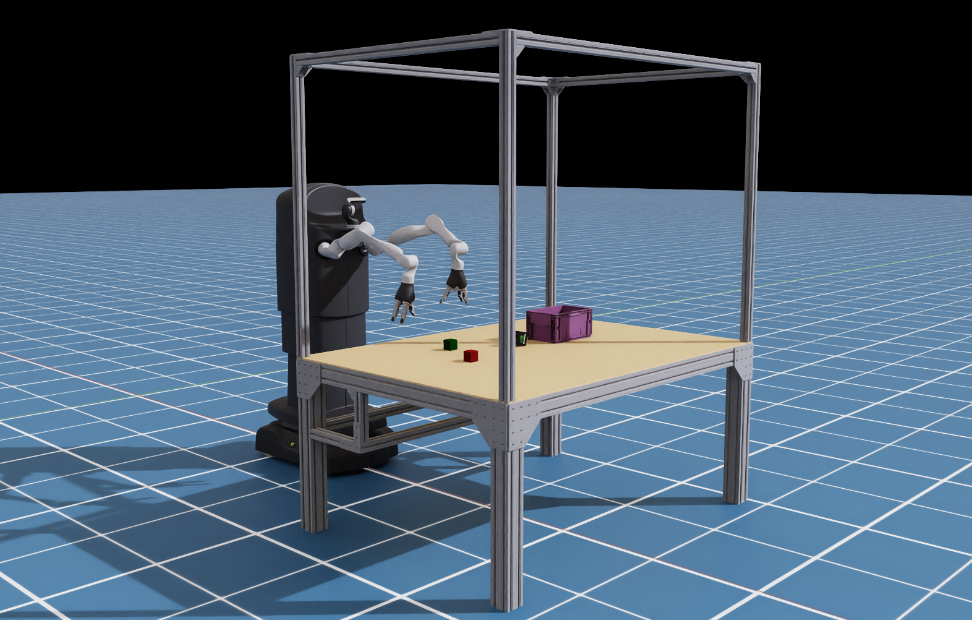
How I built a common Isaac Sim setup for MOVO and my Jaco table, cleaned up URDFs, aligned ROS2 interfaces, and created a shared playground where the same policies can run in sim and on the real hardware.
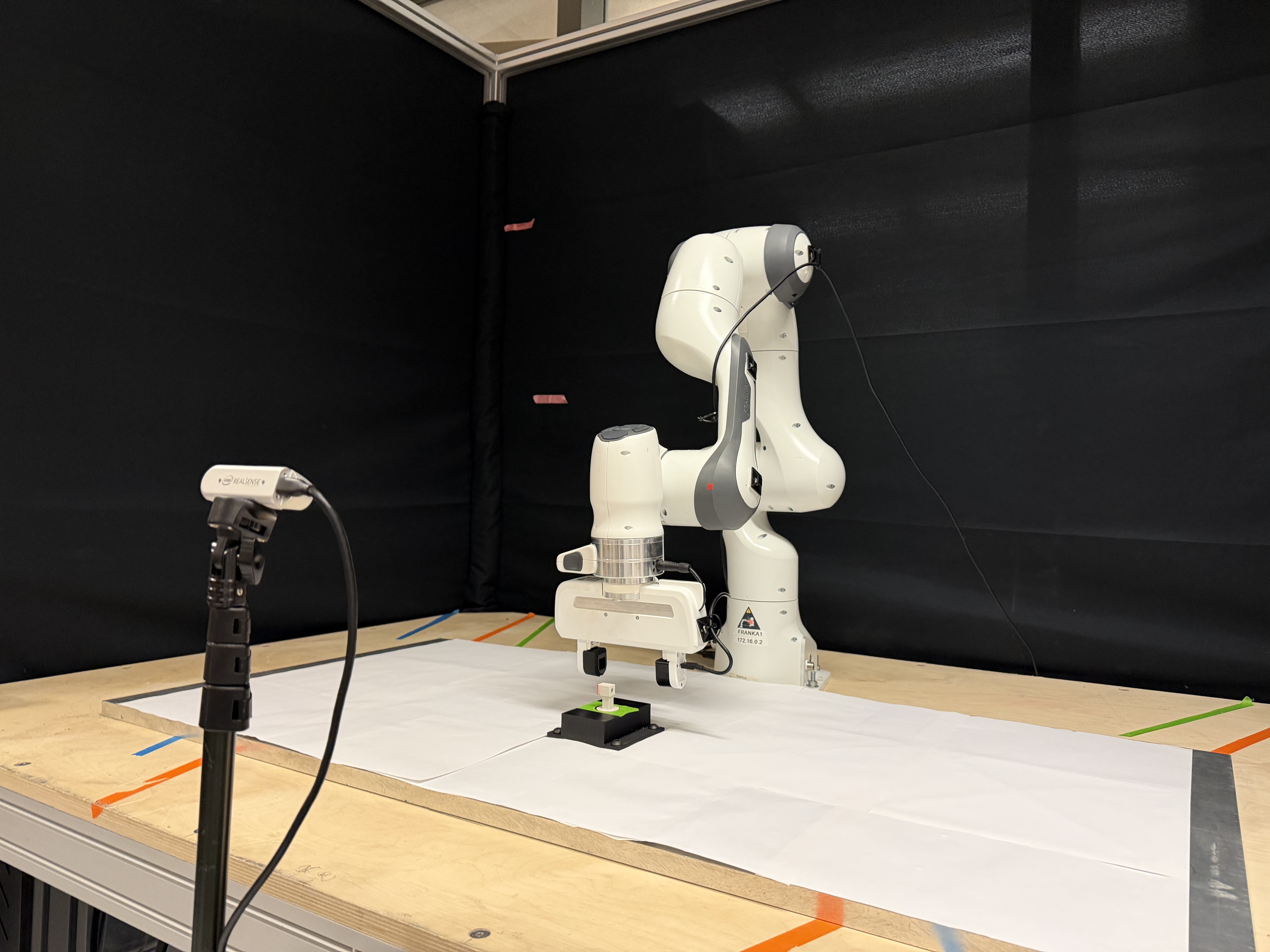
How I designed and built a custom robot arm environment with a sturdy frame, cage, power management, kill switch, sensors, and dual Kinova Jaco arms for real-world experiments.